
В настоящий момент актуальным является использование облачных сервисов для организации распределенного управления мобильными роботами: поддержки компьютерного зрения, голосового управления, планирования сложных энергооптимальных траекторий перемещения и др. Вместе с тем ограничения на условия эксплуатация и необходимость достижения заданных технико-экономических характеристик мобильных роботов требуют высокой надежности распределен-ного управления, что может быть достигнуто через разработку соответствующей программно-аппаратной архитектуры. Многообразие технологических решений и вариантов выбора архитектуры требуют создания общей методики разработки облачной архитектуры распределенных вычислительных комплексов мобильных роботов. В статье на примере организации облачного вычислительного комплекса для управления шагающим роботом AnyWalker показаны этапы выбора архитектуры и сформирована общая методика.
Предпросмотр статьи

Идентификаторы и классификаторы
Вычислительная инфраструктура современных мобильных роботов представляет собой распределенный многопроцессорный вычислительный комплекс, включающий в себя вычислительные модули на отдельных устройствах, внешние вычислительные ресурсы, и средства обмена данными и командами по беспроводным сетям. Для массово выпускаемых мобильных роботов как промышленных, так и для использования в системе образования и экспериментальных лабораториях, часто создается вычислительная платформа, включающая программно-аппаратное обеспечение по управлению механизмами и получению и обработки данных с датчиков, решение оперативных задач оставляется на локальных узлах [1–3].
Список литературы
[1] Wan J., Tang S., Yan H., Li D., Wang S., Vasilakos A. V. Cloud robotics: Current status and open issues // IEEE Access. 2016. Vol. 4. pp. 2797–2807.
[2] Saha O., Dasgupta P. A Comprehensive Survey of Recent Trends in Cloud Robotics Archi-tectures and Applications // Robotics. 2018. Vol. 7. No. 3. P. 47.
[3] Chen W., Yaguchi Y., Naruse K., Watanobe Y., Nakamura K. and Ogawa J. A Study of Ro-botic Cooperation in Cloud Robotics: Architecture and Challenges // IEEE Access. 2018. Vol. 6. P. 36662–36682.
[4] Huaimin W., Bo D., Xu J. Cloud Robotics: A Distributed Computing View // Lecture Notes in Computer Science. 2018. Vol. 11180.
[5] Galambos P. Cloud, Fog, and Mist Computing: Advanced Robot Applications // IEEE Sys-tems, Man, and Cybernetics Magazine. 2020. Vol. 6. No. 1. P. 41–45.
[6] Hu G., Tay W. P. and Wen Y. Cloud robotics: architecture, challenges and applications // IEEE Network. 2012. Vol. 26. No. 3. P. 21–28.
[7] Ryadchikov I., Sechenev S., Nikulchev E., Drobotenko M., Svidlov A., Volkodav P., Vishnykov R. Control and Stability Evaluation of the Bipedal Walking Robot AnyWalker // Internation-al Review of Automatic Control. 2018. Vol. 11. No. 4. P. 160–165.
[8] Deryugina O., Nikulchev E., Ryadchikov I., Sechenev S., Shmalko E. Analysis of the Any-Walker Software Architecture Using the UML Refactoring Tool // Procedia Computer Sci-ence, 2019. Vol. 150. P. 743–750.
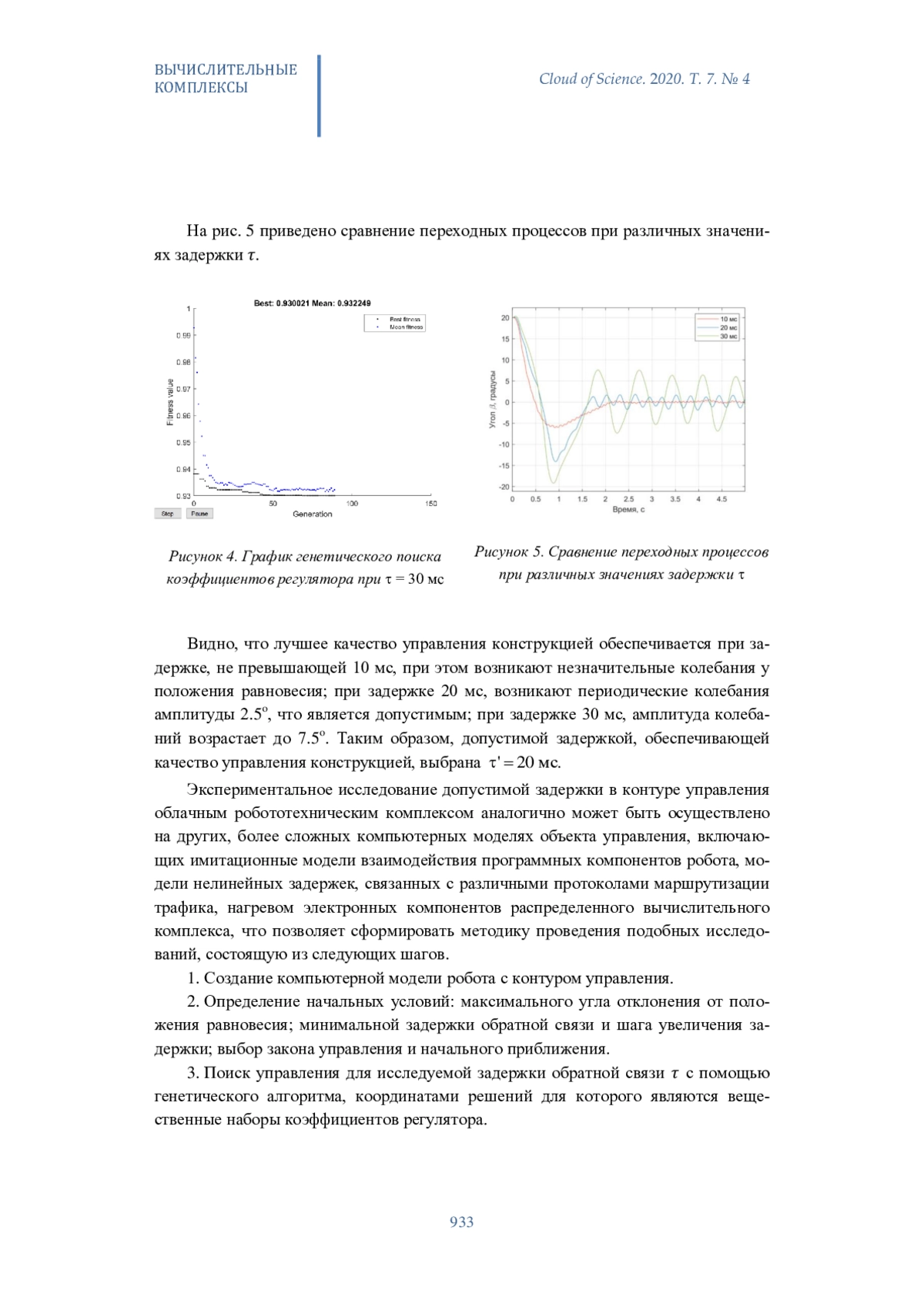
[9] Рядчиков И. В., Гусев А. А., Сеченев С. И., Никульчев Е. В. Генетический алгоритм по-иска параметров ПИД-регуляторов системы стабилизации шагающего робота // Труды НГТУ им. Р. Е. Алексеева, 2019. № 1(124). С. 52–60.
[10] Roldán J. J. et al. Multi-robot Systems, Virtual Reality and ROS: Developing a New Gener-ation of Operator Interfaces // Studies in Computational Intelligence. 2019. Vol. 778.
[11] Sundeep Desai S., Varghese V., Nene M. J. Controller Area Network for Battlefield-of-Things // Lecture Notes in Electrical Engineering. 2020. Vol. 612. S
Выпуск

Другие статьи выпуска

Рассмотрены особенности построения программного обеспечения встраиваемой вычислительной системы БПЛА. Отмечена актуальность оценки качества проектирования и функционирования ПО ответственного применения. Представлена распространенность метрической оценки качества и надежности. Целью исследования являлась возможность применения метрической оценки для анализа программного обеспечения встраиваемой вычислительной системы БПЛА. Приведена методика определения метрических характеристик программного обеспечения. Объектом исследований являлся программный код на языке ассемблер, получаемый в результате компиляции исходного кода на языке Си. В качестве критерия оценки выбраны метрики Холстеда. Разработана программа для облегчения определения первичных характеристик метрик Холстеда. Проанализированы вторичные характеристики метрик Холстеда. Проведено исследование влияния стилей программирования и оптимизации компилятора на значения метрических характеристик. Обнаружена взаимосвязь между рядом метрик Холстеда. Показана корреляция отношения словаря программы к длине программы с основными метриками Холстеда. Определены метрики Холстеда дающие боль-шую информативность. Выяснено, что отношение словаря программы к длине программы, отсутствующее в метриках Холстеда, позволяет получить сравнительную характеристику программ без вычисления метрик Холстеда. Результаты исследования планируется применять для анализа качества и надежности встраиваемого программного обеспечения вычислительной системы БПЛА.

Разработана архитектура информационно-вычислительного комплекса, обеспечивающего функционирование открытой экспериментально-аналитической цифровой платформы DigitalPsyTools психо-логических междисциплинарных исследований в системе образования. Разработка комплекса позволила создать информационную базу для унификации исследовательских методик и разработать единую и постоянно расширяемую базу методов психологической диагностики для специалистов, работающих в исследовательских и образовательных учреждениях России с целью учета в системе образования индивидуально-психологических особенностей.

Выполнен сравнительный анализ приложений для контроля активности пользователя. Исследование показало, что функциональных возможностей существующих приложений недостаточно, чтобы оперативно определить какой деятельностью занимается пользователь, что говорит о необходимости дополнительного автоматизированного анализа данных. В статье представлено решение анализа данных активности пользователя, а именно: описаны параметры, собираемые с запущенных приложений пользователя; описана архитектура нейронной сети, использующаяся непосредственно для анализа этих данных. Представленные результаты работы показывают, что обученная с учителем нейронная сеть автоматически определяет, какой деятельностью занимается пользователь Разработанное программное обеспечение в удобной и наглядной форме отображает информацию активности пользователя в виде различных диаграмм.

В статье рассмотрены особенности внедрения и дальнейшего сопровождения корпоративных информационных систем. Показано, что при внедрении и, в особенности, при дальнейшем сопровождении система становится самостоятельным продуктом и развивается по своим законам, при этом число таких продуктов является конечным и не очень большим. Понятия внедрение и сопровождение системы трактуются шире, чем согласно ГОСТ 34.601.

Научный и практический интерес к системам искусственного интеллекта сохраняется на высоком уровне последнее десятилетие. Однако разработка систем искусственного интеллекта сталкивается с различными проблемами. Выделены научная и социально-экономические проблемы систем искусственного интеллекта. Научная проблема заключается в нефункциональном описании мира. Социально-экономические проблемы связаны с зависимостью от ситуации в экономике страны. Предложено разделять научно-технический и потребительский прогресс по критерию.

Разработан алгоритм расчета технического состояния авто-матизированной системы управления противопожарной защитой. Последовательно, на каждом шаге вычисления описано назначение и функции блоков алгоритма. Разработана программа для проведения количественных расчетов для оценки и прогнозирования состояния систем противопожарной защиты на ЭВМ.

Индустрия автоматизированного ритейла представлена сейчас двумя основными типами сервисов — магазины без продавцов и автоматизированные пункты выдачи товаров из интернет-магазинов. Ни один из этих сервисов не обеспечивает в полной мере потребности покупателей одежды, обуви и спортивных товаров, поскольку не дает возможность примерить товар. В статье рассмотрена ситуация на рынке автоматизированного ритейла, проанализированы потребительские и технологические тренды, сформулированы актуальные потребительские запросы и предложен новый формат пунктов выдачи товаров из интернет-магазинов — полностью автоматизированные пункты выдачи с при-мерочными и голосовым ассистентом. В статье предлагается перечень потребительских и технических характеристик, который может быть использован для проектирования и вывода на рынок подобного продукта.

В статье рассматривается проблема автоматизации составления расписания высшего учебного заведения. Описаны существующие решения, рассмотрены их ключевые достоинства и базовые ограничения. Авторы рассмотрели основные требования типового вуза и предложили новый подход, учитывающий сложный процесс согласования расписания по всей цепочке: преподаватель, кафедра, диспетчерская. Учтены особенности формирования расписаний семестра, экзаменов, групп заочного обучения, внеучебная деятельность вуза, требующая бронирования аудиторий. Авторы подробно описывают отдельные аспекты реализации информационной системы, в том числе процессы взаимодействия при составлении расписания. Созданное решение используется в учебном процессе СПбГЭТУ «ЛЭТИ».

При решении задачи автоматизации движения портального крана возникает необходимость упрощения маршрута движения, обобщения и приведения траекторий перемещения к требуемому виду. В работе предложен один из возможных способов автоматизации решения задачи редукции набора перемещений технологического маршрута к сокращенному набору обобщенных «магистральных» линий с использованием алгоритмов генетического поиска. Предлагаемый способ учитывает полный комплекс операций крана (маршрутную последовательность), специальные требования к форме траекторий и ограничения схемы движения, размеры и расположение запрещенных зон.

В работе рассмотрена проблема оценки характеристик самолета на режимах сверхманевренности. Изложена методология испытаний самолета на этих режимах как комплекс взаимосвязанных методов, методик, моделей. Определены допустимые области маневрирования самолета и показатели, характеризующие процессы управления и состояния самолета, а также технология безопасного выполнения контрольных маневров, необходимых для определения указанных характеристик. Приведены практические результаты работы в области испытаний само-летов на режимах сверхманевренности и режимах штопора.

Рассматривается современный эвристический подход к про-ектированию сложных технических систем в гражданской авиации на основе V-процесса, рекомендуемого руководством ARP4754A. Дается интерпретация и формально-математическое обоснование этого подхода на языке современной алгебры в рамках новой парадигмы в теории систем, развиваемой на основе общего принципа изоморфизма. Обсуждается возможность сопряжения этого подхода с перспективным телеоцентрическим подходом. Доказывается, что эти и любые другие эвристические подходы к проектированию систем должны отвечать условиям теоремы о реализации. Тем самым обеспечивается научное обоснование широко используемого подхода к системному проектированию и предлагается вариант его развития.

Для случайной величины, являющейся несмещенной оценкой максимального правдоподобия показателя распределения Парето установлены различные теоретико-вероятностные характеристики, в частности, закон распределения. Полученный закон распределения назван законом распределения первого порядка. В настоящей работе ставится задача исследования свойств оценки максимального правдоподобия для параметра этого распределения по заданной выборке из этого же распределения — параметра распределения второго порядка. Доказано, что этот параметр получается по тем же формулам, что и параметр распределения первого порядка. Доказано по индукции, что это же верно и для всех последующих порядков распределения: третьего, четвертого и так далее. Предложено полученную закономерность называть инерцией формы оценки параметра распределения этой величины. Показано, что эта же закономерность справедлива и в других случаях, в частности, для показательного распределения.

В статье рассмотрено применение STEM- и STEAM-технологий при освоении студентами минимального подмножества Py-thon для решения научно-технических и инженерных задач. Конструкции языка вводятся параллельно с генерацией и визуализацией узоров и фракталов. Рассматриваются возможности геймификации для освоения библиотек экосистемы Python, при проведении многовариантных расчетов, визуализации и интерпретации полученных результатов.

В Федеральном исследовательском центре информационных и вычислительных технологий осуществляется разработка и поддержка системы комплексного анализа художественных текстов, которая вклю-чает в себя совокупность авторских модулей, функционирующих в рамках единой информационной системы. Доступ внешних пользователей к системе осуществляется с помощью веб-интерфейса; отдельный компонент интерфейса представляет собой модуль поиска, который взаимодействует с хранилищем (базой данных) посредством генерации и обработки SQL-запросов. Пользователь имеет возможность выполнять сложные поисковые запросы к информационной системе, которые увеличивают нагрузку на базу данных. Применена оптимизация работы поискового модуля с внедрением индексов в базу. Проведен эксперимент, который включал в себя итерации по формированию запросов к базе данных с измерением времени на их обработку — с индексами и без них; при уменьшении времени запроса добавленные индексы сохранялись, и итерация повторялась. Сделаны выводы об эффективности применения индексов в базе данных, в рамках которой организована структура данных художественных текстов.

Формально значимость научных журналов характеризуется посредством их ранжирования на основе показателей, построенных с использованием данных о цитировании статей. Показатели журналов и по-строенные на их основе рейтинги дают лишь частичное понимание ситуации, поэтому их адекватность или хотя бы приемлемость должна подкрепляться другими оценками. Представляется перспективным путь, когда рейтинги, полученные в общенаучных базах для журналов конкретного научного направления, находят подтверждение в рейтингах, полученных в более узких базах журналов этого направления, имеющих высокую репутацию. В работе предлагаются три «репутационных признака», основой которых служат самоцитирование, концентрация статей и эффект Матфея. На примере Math-Net. Ru показаны методы вычисления значений репутационных признаков, демонстрирующих высокую репутацию этого ресурса, и дана сравнительная оценка ряду показателей eLIBRARY. RU.
Статистика статьи
Статистика просмотров за 2025 год.
Издательство
- Издательство
- МТИ
- Регион
- Россия, Москва
- Почтовый адрес
- 105318, г. Москва, Измайловский вал, д. 2
- Юр. адрес
- 105318, г. Москва, Измайловский вал, д. 2
- ФИО
- Романчук Михаил Николаевич (РЕКТОР)
- E-mail адрес
- mti@mti.edu.ru
- Контактный телефон
- +7 (495) 2252335
- Сайт
- https://mti.edu.ru/